Dans le cadre d’un projet développé par le CNES au titre de sa contribution nationale à la mission Alpha de l’ESA, un robot culinaire est imaginé pour envisager l’alimentation des astronautes pour les futures missions habitées de longue durée (Lune, Mars). Le démonstrateur devra être capable de montrer sa capacité à cuisiner dans l’espace, notamment dans l’ISS en atmosphère de micro-pesanteur – en savoir plus en vidéo.
Notre collaboration
Suite à une première séquence de développement validant le concept lors de tests en vol parabolique, nous apportons à l’agence INNEOLAB en charge du développement notre expertise dans la conception d’équipement étanche. Nous nous penchons plus particulièrement sur l’enceinte dédiée au foisonnement et au mélange culinaire.
Actions réalisées
- Phase 1: Etats de l’art des systèmes d’étanchéités statiques et dynamiques,
- Phase 2: Propositions de solutions d’intégration cinématique et d’étanchéité,
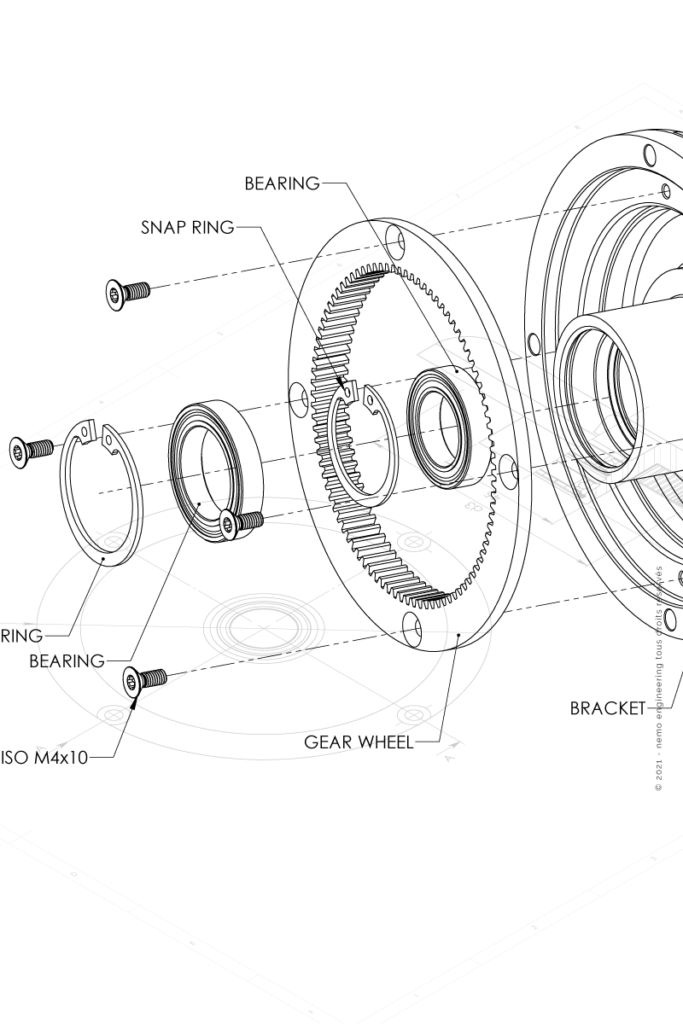
- Phase 3: Conception d’une maquette numérique,
- Phase 4: Justifications des choix de conception.
Compétences mises en œuvres: ingénierie mécanique